

Dentro de las actividades que tiene el Laboratorio de Cómputo de Ingeniería, además de administrar el software y hardware que se utiliza en el aspecto académico, también desarrolla proyectos de otra índole y en este caso, cómo es el caso que se presenta, elaborado por un estudiante de la Facultad de Ingeniería en las instalaciones del LCI, cómo parte de su servicio social. El objetivo del proyecto es continuar con una línea de investigación de robótica, que busca generar la curiosidad en los estudiantes y comprobar que se pueden elaborar proyectos de este tipo a un bajo costo, específicamente, un brazo robótico que pueda desempeñar diversas actividades, a través de un control sencillo y práctico.
Imagina un robot capaz de realizar tareas tan variadas como la impresión 3D y el corte láser. Ese es el Monorriel Tripteron, un robot manipulador con un diseño modular y un amplio rango de movimiento que lo convierte en una herramienta extremadamente versátil para múltiples aplicaciones industriales.
Un robot manipulador es un mecanismo diseñado para mover objetos con precisión a través de diferentes movimientos programados. Estos robots están compuestos por barras rígidas conectadas por articulaciones, de manera similar a un brazo humano, lo que les permite realizar tareas que pueden ser peligrosas o que requieren una precisión elevada, reemplazando así al ser humano en muchas situaciones.
El Tripteron es un robot manipulador diseñado para que su posición pueda calcularse de forma sencilla mediante ecuaciones lineales. Esto permite saber exactamente dónde está cada parte del robot en todo momento. Además, su diseño desacoplado significa que los movimientos en una dirección son independientes de los otros, lo que le otorga una flexibilidad increíble. En esencia, el Tripteron es como un brazo robótico súper flexible que puede moverse en muchas direcciones de forma rápida y precisa, lo que lo hace ideal para tareas que demandan alta exactitud, como la impresión 3D.
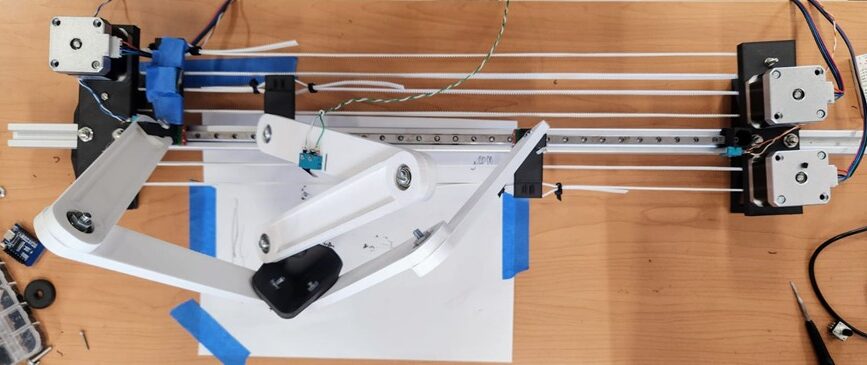
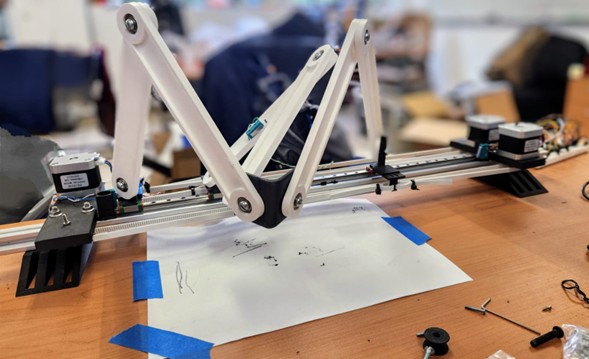
En este proyecto, hemos decidido desarrollar una variante llamada Monorriel Tripteron. Esta versión mantiene las características esenciales del diseño original, pero con una mejora clave: en lugar de usar tres rieles para controlar cada eje, utiliza solo uno, lo que simplifica el sistema y lo hace aún más eficiente. El Monorriel Tripteron cuenta con tres “brazos” conectados a carros en la base y a una plataforma móvil, que actúa como el efector final. Cada motor mueve un brazo, por lo que es fundamental que los materiales sean rígidos, garantizando movimientos precisos del efector.
Gracias a esta modificación, el Monorriel Tripteron no sólo conserva una alta velocidad y precisión, sino que también ofrece un área de trabajo menos limitada, lo que amplía sus aplicaciones en áreas como la impresión 3D y el corte láser. Es una herramienta poderosa y adaptable, ideal para el futuro de la manufactura y el diseño.

Responsable del proyecto: Ángel Ivan Aboytes Hernández, alumno de séptimo semestre de la carrera de Ingeniería Electrónica.




Deja un comentario